1. Was bedeutet das?
Üblicherweise liegt der Schwerpunkt bei einem Flugzeug in Flugrichtung vor dem Neutralpunkt, ansonsten ist es für einen üblichen Piloten nicht steuerbar. Wenn man den Schwerpunkt aber hinter den Neutralpunkt legt und den damit verbundenen Verlust an "normaler" dynamischer Längsstabilität durch eine Regelung ausgleicht, kann man andere Eigenschaften verbessern, z.B. die Wendigkeit erhöhen (so ist es bei Kampfflugzeugen üblich) oder bei einem Brettnurflügel den Anstellwinkel erhöhen ohne das Profil negativ zu verwölben und somit Leistung und Breitbandigkeit erhalten.
Der tatsächliche Anstellwinkel muss gemessen werden, beim Einsatz eines Nickdämpfers (der u.U. hilfreich, manchmal auch nötig ist) ist zusätzlich ein Drehratensensor nötig.
Für eine ausführliche Einführung empfehle ich das Dokument von Helmut Schenk zum Thema.
2. Vorversuch mit Gebläse ("Windkanal")
Der Anstellwinkelsensor verhielt sich im Luftstrom des Eigenbaugebläses einigermaßen stabil. Um schneller und ohne "Feldversuche" zu Erfahrungen zu kommen, soll ein möglichst großer Teil des Experiments zunächst mit diesem Gebläse stattfinden.
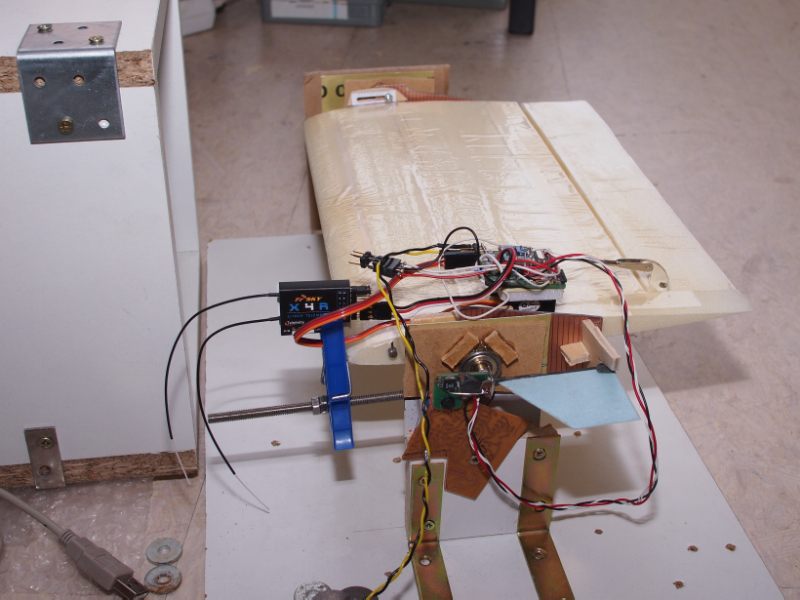
Es wurde auf die Schnelle mit vorhandenem Material ein sehr einfacher Aufbau erstellt.
-
Flügelsegment aus Styrodur, durchgehende Klappe, zunächst nur mit Tape bespannt. Ich habe den Kern vor dem Tapen mit Sprühkleber behandelt und vermutlich nicht lange genug ablüften lassen, jedenfalls hat das Klebeband am nächsten Tag deutliche Falten geschlagen (wie man auf dem Bild sehen kann).
-
Der Drehpunkt ist zwischen 20% und 30% der Flügeltiefe verstellbar.
-
Der Flügel muss um den Drehpunkt ausgewogen sein, bei Verstellung des Drehpunktes muss auch der Schwerpunkt nachjustiert werden. An beiden Flügelenden kann eine Gewindestange mit dem Flügel verbunden werden, worauf wiederum Gewichte (Unterlegscheiben) befestigt werden.
-
Zur Messung des Anstellwinkels wird der bisherige Anstellwinkelsensor benutzt, das reduziert Arbeit an verschiedenen Stellen. Der Sensor wird am Gestell montiert, eine am Flügel befestigte Gabel mit etwas Abstand zur Drehachse nimmt die Windfahne mit. Schaumstoff sorgt dafür, dass kein Spiel in der Mitnahme ist.
-
Servo und Elektronik (inkl. Drehratensensor) werden mit Doppelklebeband aufgeklebt.
Mit diesem Aufbau wurde die Anstellwinkelregelung und der Nickdämpfer bei verschiedenen Stabilitätsmaßen getestet. Deutlich konnte man sehen, dass bei negativem Stabilitätsmaß mit steigendem Anstellwinkel die Ruderklappe im eingeschwungenen Zustand immer positiver ausgeschlagen wird.
Die Elektronik und Software entsprach bereits dem Stand, der später in die Modelle eingebaut wurde. Über den Sender sind der Sollwert des Anstellwinkels, der Aufschaltfaktor des Anstellwinkelreglers und der Aufschaltfaktor des Nickdämpfers einstellbar. Alle relevanten Größen werden zur späteren Auswertung aufgezeichnet.
3. Versuch mit einem Leitwerkler
Mangels Erfahrung fängt man möglichst einfach an — ich habe einen Anstellwinkelsensor und die nötige Elektronik in einen kleinen, einfachen Elektrosegler gebaut (1,5m Spannweite, Eigenbauflächen, Rumpf von einem Bausatzmodell).
Zunächst erfolgten Flüge mit normaler Stabilität, wobei das Sensorverhalten geprüft wurde und vor allem ob während üblicher Flugphasen der Anstellwinkel innerhalb des Sensormessbereichs liegt.
Ebenfalls mit normaler Stabilität wurde der Anstellwinkelregler mit zunächst kleiner Verstärkung aktiviert und der Soll-Anstellwinkel justiert, so dass das Modell mit unverändertem Einstellwinkel flog. Iterativ wurde die Verstärkung erhöht und der Sollwert justiert, bis sichergestellt war, dass der Sollwert zum üblichen Anstellwinkel passt und der Regler wirksam ist.
Danach wurde mit jedem Flug der Schwerpunkt zurückversetzt und — wenn nötig — Reglerverstärkung und Sollwert angepasst.
Die Flüge waren geradezu langweilig. Auch bei eingeschaltetem Motor funktionierte das System wie gewünscht. Das Stabilitätsmaß wurde bis auf -10% reduziert.
Dieses Modell ist ohnehin windempfindlich, die künstliche Stabilität hat diese Eigenschaft nicht merklich verändert.
Zunächst hatte ich Sorge, dass der Sensor beim Werfen des Modells noch nicht ordentlich angeströmt wird, aber diesbezüglich hat es keine Probleme gegeben.
Auch bei Schwerpunktrücklage reichen billige Servos aus, die weder schnell noch besonders präzise sind. Das gleich gilt für die Anlenkung.

4. Versuch mit einem Brettnurflügel
Es wurde mal wieder das Brett benutzt, die Vorgehensweise war die gleiche wie beim Leitwerkler.
Hier sind eine spielfreie Ruderanlenkung und präzise Servos vorhanden, weil schon der normal eingestellte Brettnurflügel sie erfordert.
Zunächst musste ich feststellen, dass die Starts etwas aufregender waren, denn ich hatte keinen Werfer und habe den Schwerpunkt in recht großen Schritten zurückverlegt. Ich bin ich immer relativ lang gelaufen (wegen der Sensoranströmung), der Abwurf wurde erheblich sorgfältiger ausgeführt als üblicherweise.
Auch hier waren Steigflüge mit Motor kein Problem.
Die Höhenruderausschläge wurden im Verlauf deutlich vergrößert, denn das Steuergefühl war sonst träge.
Der Nickdämpfer wurde nicht benötigt.
Nebenbei zeigte sich ein praktischer Aspekt der asymmetrischen Windfahne: man kann den Rumpf inkl. der Windfahne auf einer ebenen Unterlage auf eine Seite legen, ohne die Windfahne zu beschädigen.

Am Ende lag das Stabilitätsmaß laut AVL bei -3,2%, geometrisch bei -1,5%. Ich bin mit einem Aufschaltfaktor von ungefähr 1,6 geflogen. Gegenüber der einfachen Theorie muss man aber beachten, dass die Klappe nur einen Teil (68%) der Spannweite ausmacht und der Flügel außerdem zugespitzt ist.
Als diese Einstellung erreicht wurde herrschte fast Windstille.
Mit den gleichen Einstellungen wurden noch Flüge an einem windigeren Tag gemacht, für dieses Modell waren das aber eigentlich noch leichte Bedingungen (bei normaler Stabilität). Dabei fand ich das Verhalten dann nicht mehr so angenehm.
Nun muss man aber beachten, dass diese Geometrie (in meinen Augen) für die künstliche Stabilität ungeeignet ist, denn was bei normaler Stabilität vorteilhaft ist, kehrt sich nun ins Gegenteil um: beim Ziehen sorgen die nicht bis innen laufenden und nach außen (relativ) tieferen Klappen normalerweise dafür, dass der Außenflügel weniger abrissgefährdet wird (der lokale Auftrieb nimmt stärker ab als camax).
Mit der Schwerpunktrücklage bedeutet zu ziehen nun aber, dass der Außenflügel letztlich positiv gewölbt wird und der Anstellwinkel steigt. Das ist nicht gut für die Flugeigenschaften. Aus diesem Grund wurde der Schwerpunkt auch nicht weiter zurückverlegt.
Für weitere Versuche müsste also ein Flügel mit einer angepassten Rudergeometrie gebaut werden. Aus den hier gewonnenen Erkenntnissen kann man auch ableiten, welchen Momentenbeiwert die dabei zu benutzenden Profile haben sollten.
4.1. Klappenstellung, Anstellwinkel
Abgesehen von der Flugtauglichkeit war für mich die wesentliche Frage: welche Klappenstellungen stellen sich denn wirklich während des Flugs ein? Unter anderem wurden die Ansteuersignale für die Servos und der Anstellwinkelmesswert aufgezeichnet (im Zeitraster von Messwerterfassung, Regelung, Ausgabe der Servosignale: 9,25ms).
Aufgrund der Tatsache, dass der Regler ständig arbeitet und vor allem bei einer Abweichung die Klappe zunächst in einer Richtung ausschlägt bevor sie zum eingeschwungenen Zustand in der anderen Richtung läuft, ist klar, dass das Ergebnis der Darstellung "Anstellwinkel über Klappenausschlag" eine Punktwolke ist.
Weil der eingeschaltete Motor möglicherweise den Momentenhaushalt durcheinanderbringt, sind die zugehörigen Abtastpunkte nicht Teil der Darstellungen.
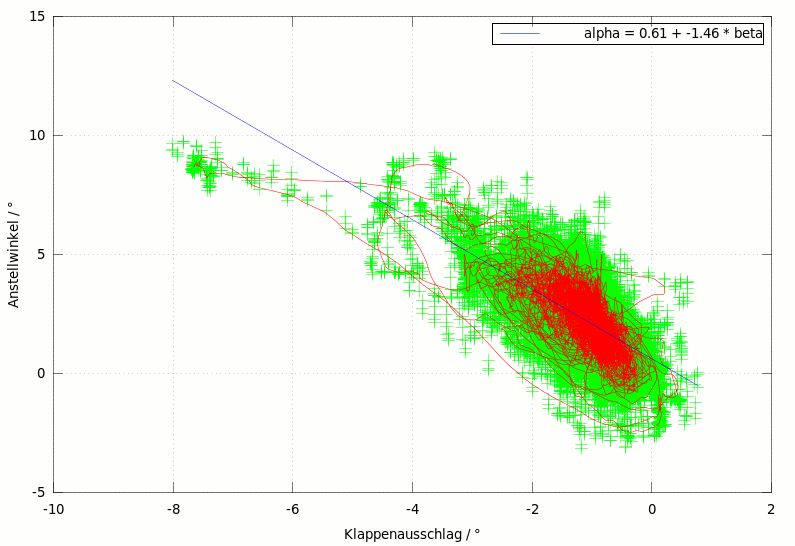
Dargestellt sind in grün die einzelnen Abtastwerte, die rote Linie zeigt den Verlauf der gefilterten Abtastwerte, die blaue Linie ist die passende lineare Funktion mit kleinstem quadratischem Fehler.
Der angezeigte Klappenausschlag hat nur einen kleinen Fehler (abgesehen davon, dass die Servos nicht beliebig schnell sind, denn es wurde ja der Stellwert für die Servos aufgezeichnet und nicht deren Istposition). Der Anstellwinkel jedoch hat einen Offsetfehler, er ist nicht auf die Profilsehne oder eine andere wohldefinierte Referenz bezogen.
Beim Flug mit natürlicher Stabilität, die Daten umfassen 713 Sekunden Flugzeit:
Der Abschnitt mit stark gezogenem Höhenruder und großem Anstellwinkel
ist ein Looping. Wenn man diesen herausnimmt um die Ersatzfunktion zu
berechnen, ergibt sich alpha = 0.44 - 1.63 * beta. Wenn man alle
Messpunkte mit weniger als -3° Klappenausschlag herausnimmt, ergibt
sich alpha = 0.36 - 1.71 * beta. Sieht das evtl. nur
nichtlinear aus, weil die wirkliche Ruderkinematik nicht
berücksichtigt wurde? Nein. Zwar habe ich hier linearisiert, aber erst
ab 15° Klappenausschlag wird es sichtbar nichtlinear, selbst bei 20°
ist der Fehler noch klein.
Beim Flug mit Stabilitätsmaß laut AVL bei -3,2%, geometrisch -1,5%, die Daten umfassen 872 Sekunden Flugzeit:
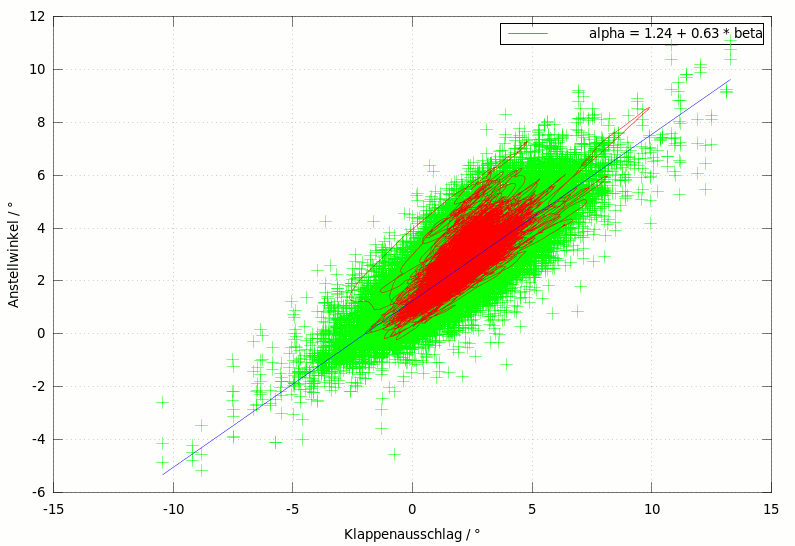
Aus dem Vergleich der beiden Bilder kann man schon sagen, dass die instabilen Flüge also mit deutlich negativem Stabilitätsmaß stattgefunden haben, denn im eingeschwungenen Zustand stieg der Anstellwinkel mit der Klappenstellung; bei normaler Stabilität ist es gerade andersrum.
Zu einer Zeit mit viel Langeweile sollten diese Ergebnisse noch ausführlich mit der Theorie verglichen werden.