1. Ausgangszustand, Motivation
Ich habe mit einer empfohlenen Antriebskombination begonnen: 3s LiPo, Robbe Roxxy 2815/24, auf ca. 9" gekürzte EPP1045.
Aufgrund meines sehr leichten Kopters flog diese Kombination aber mit nur 1/3-Gas, also mit sehr geringer Spannung (und entsprechend hohem Strom). Wegen der ohmschen Verluste in den Kabeln und in der Endstufe ist es grundsätzlich erstrebenswert, eher mit hoher Spannung und geringem Strom zu operieren, aber in diesem Fall gibt es ein viel stärkeres Argument: es ist bei den derzeit erhätlichen BLDC-Stellern dieser Leistungsklasse üblich, im Teillastbetrieb den Strom während der Aus-Zeit über die in den FETs eingebauten Dioden fliessen zu lassen, anstatt den entsprechenden Brückenzweig durchzuschalten (was aufgrund der sehr einfachen Ansteuerung eben nicht leicht möglich ist). Je kleiner nun aber die gestellte Spannung ist, desto größer ist diese Freilaufzeit, in welcher die Verluste im Steller (an der Freilaufdiode) übermäßig groß sind.
Nachdem ich nun bei der Abflugmasse meines Kopters nicht mehr viel optimieren kann, sind diese Verluste der nächste wirklich lohnenswerte Optimierungsfall.
2. Verbesserungsmöglichkeiten
Ich könnte einfach mit 2s anstelle 3s fliegen, um die Freilaufzeit zu verkürzen, aber es sind nun mal drei 3s-Lipos vorhanden, die ich weiterbenutzen möchte.
Weitere Möglichkeiten:
-
kleinerer Propeller, um den gleichen Schub bei höherer Spannung und Drehzahl zu erreichen: wird getestet, jedoch muss beachtet werden, dass der Wirkungsgrad von größeren und langsam drehenden Propellern besser ist. Der Propeller kann also nicht beliebig klein gemacht werden. Außerdem gibt es keine sehr große Auswahl an Propellern.
-
Motor mit kleinerer spezifischer Drehzahl: in dieser Leistungsklasse käuflich praktisch nicht zu erwerben. Die verwendeten Motoren lassen sich aufgrund der mechanischen Konstruktion auch nicht einfach umwickeln, aber es wurde ein anderer Motor gefunden, bei dem das möglich ist; siehe unten.
-
Verbesserung des Motorstellers: das kommt später, weil es ein größerer Aufwand ist.
3. Neuer Motor
Anforderungen:
-
leichter als der bisherige (möglich, weil der auch nicht ausgelastet war)
-
Möglichkeit, den Motor umzuwickeln
-
passende rückseitige Halterung (zylindrisches Ende ohne Verschraubung ist ungünstig)
Ausgewählt habe ich den "Turnigy 3020-1200". Dieser Motor hat 24 Zähne (Nuten), 22 Magnete (Pole). Das Verhältnis f_mechanisch zu f_elektrisch ist (bestimmt durch die magnetische Polpaarzahl) 1:11.
Sonstiges: laut Wicklungsrechner AaAabBbBCcCcaAaABbBbcCcC; Wickelschema; 24N22P-Motor im Stern verschaltet.
Wenn mir kein Fehler unterlaufen ist, hat der gelieferte Motor folgende Wicklung (nicht jeder Übergang ist eingezeichnet, die Windungszahlen stimmen auch nicht):
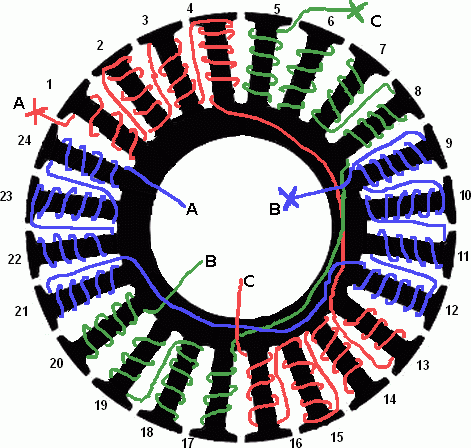
Er wird in Dreiecksschaltung geliefert, dabei sind die beiden Anschlüsse A miteinander verbunden, ebenso B und C. Zum Umbau auf Sternschaltung habe ich die mit farbigen Kreuzen markierten Enden zum Sternpunkt verschaltet.
Der verwendete Kupferlackdraht hat einen Außendurchmesser von 0,25mm.
3.1. Mechanischer Vergleich mit dem 2815/24
Der Turnigy ist leichter, muss aber vorsichtig behandelt werden, weil die Anschlußdrähte einfach nur der weitergeführte Wicklungsdraht ist. Somit ist hier der Querschnitt gering (hoher Widerstand); die Kabel sind nicht vor Zug- und Biegebelastung geschützt.
Die Schrauben, um die das Propsavergummi gelegt wird, sind nicht mit Schrumpfschlauch überzogen (Gewinde schneidet ins Gummi); außerdem ist die Lage nicht immer ordentlich, so dass man möglicherweise die Schraube rausdrehen muss, um das Gummi zu befestigen.
4. Vergleichsmessungen, 05.06.2010
Auf einem Prüfstand wurde der Standschub gemessen und gleichzeitig die Drehzahl sowie der Strom am Eingang des BLDC-Stellers. Die Versorgungsspannung des Stellers wurde ein- und nachgestellt (Labornetzteil).
Der vom Steller aufgenommene Ruhestrom (ca. 10mA) wurde nicht der unten aufgeführten Eingangsleistung zugeschlagen.
Komponenten:
-
"turnigy1" und "turnigy2" sind zwei Exemplare des "Turnigy 3020-1200". Exemplar 1 wurde auf Sternschaltung umgebaut ("turnigy1stern"). "fusion" ist ein Fusion 2815/24 (baugleich Robbe Roxxy).
-
Luftschraube APC 8" x 3,8". 7,3g. Zufällig habe ich jetzt gesehen, dass es diese Luftschraube links- und rechtsdrehend gibt, sie also durchaus für den Kopterbetrieb in Frage kommt. Dieses Exemplar hatte ich vor einigen Jahren NICHT für diesen Zweck gekauft.
-
Luftschraube EPP1045, glatt, auf 233mm gekürzt. Drehrichtung: in Flugrichtung rechtsherum, so wie übliche Modellflugzeugpropeller; er ist nicht mit "R" beschriftet. Das Exemplar auf dem Fusion war jedoch nicht das gleiche wie das andere; wie man aber unten sieht, zeigen sie gleiches Verhalten. 6,35g.
-
Luftschraube EPP0845, Oberseite rauh, 6,0g (vielen Dank für’s Ausleihen, Nic!). Drehrichtung wie die beiden anderen. Diese Luftschraube hatte ich bei den ersten Messungen noch nicht; auch aus Gründen der Übersichtlichkeit wurden deren Ergebnisse nicht in der ersten Grafik nachgetragen.
-
Der Steller ist ein DragonSky 10A mit Originalsoftware, Taktfrequenz 8 kHz, Timing unbekannt.
Bei einer Messung ist keine Versorgungsspannung angegeben, sondern "Vollgas variabel": hier wurde der Motorsteller auf "Vollgas" gestellt und stattdessen die Eingangsspannung variiert; damit sind die Verluste im Steller minimiert.
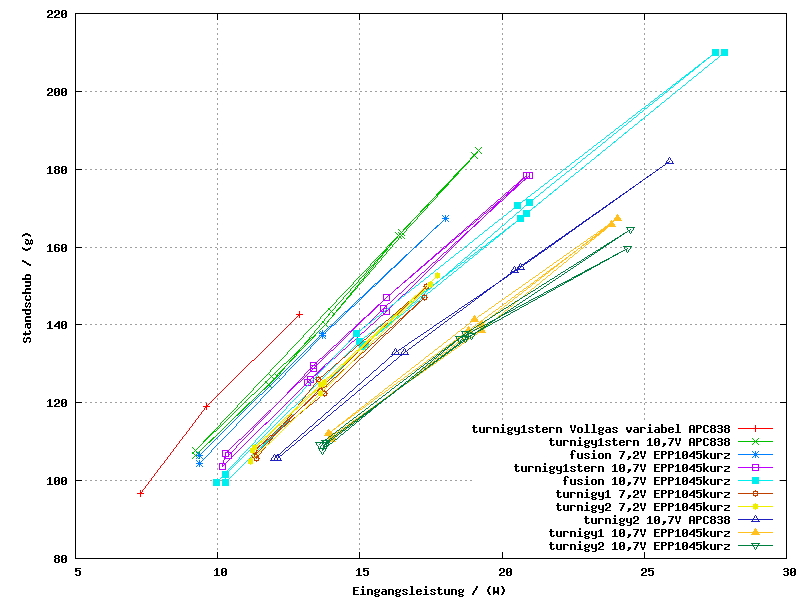
Am folgenden Bild sieht man:
-
die beiden Turnigy-Exemplare verhalten sich gleich
-
bei gleicher Eingangsspannung und gleichem Propeller hat die Kombination mit 2815/24 einen erheblich besseren Wirkungsgrad als die mit dem Turnigy in Dreiecksschaltung. Ob das nur an der niedrigeren spezifischen Drehzahl liegt (1100 anstatt 1200), ist fraglich. Ich rechne es hier nicht nach..
-
eine Verringerung der Eingangsspannung bringt natürlich viel
-
der turnigy in Sternschaltung ist nur wenig besser als der 2815/24 bei gleicher Spannung und Luftschraube, obwohl die spezifische Drehzahl viel kleiner sein sollte. Vermutlich hat der Motor einfach einen erheblich schlechteren Wirkungsgrad als der 2815/24. In Bezug auf meinen Kopter ist allerdings zu beachten, dass durch diesen Motor der Kopter gut 8 Prozent leichter wird, was die nötige Leistung wiederum entscheidend senkt.
-
vermutlich ist der 2815/24 für etwas schwerere Kopter gar nicht schlecht
-
ich muss EPP0845 kaufen und testen; mit großer Sicherheit passen sie besser zum leichten Kopter mit dem turnigy in Sternschaltung (dem ist nicht so, siehe unten).
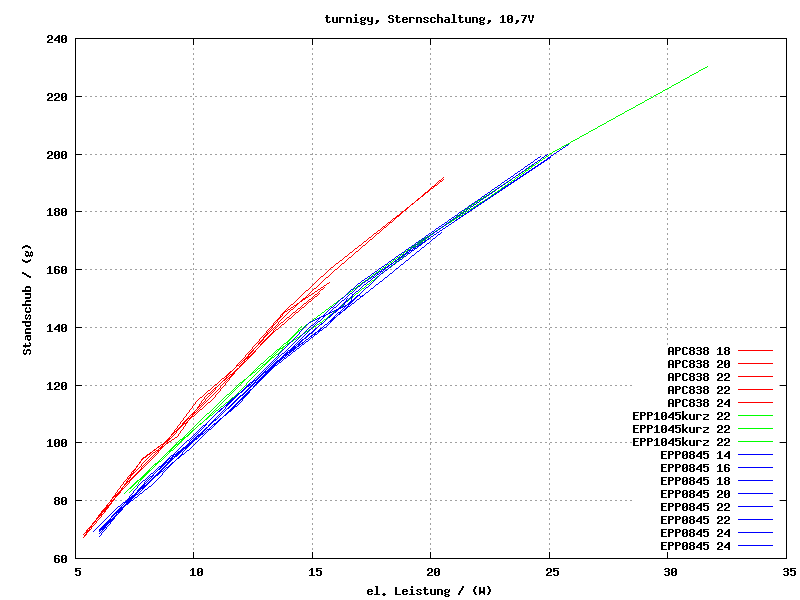
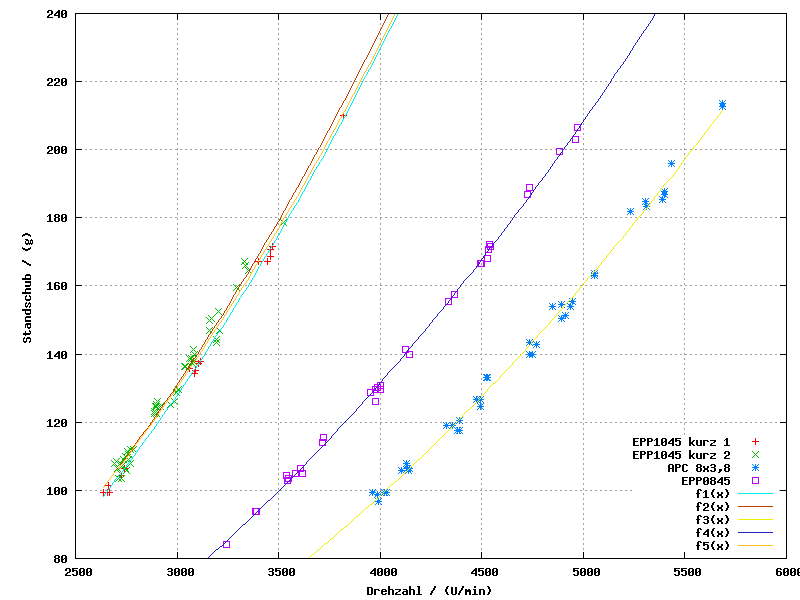
Das nächste Bild zeigt den Zusammenhang zwischen Drehzahl und Standschub. Mit durchgehenden Linien sind Anpassungen an die Messpunkte gezeichnet, die eigentlich eine Proportionalität zwischen dem Quadrat der Drehzahl und dem Standschub zugrunde legen sollten. Bei der APC passte das aber nicht so gut, daher habe ich einen linearen Term dazugegeben.
Die beiden gekürzten EPP1045 zeigen ein erwartungsgemäß ähnliches Verhalten.
5. Vergleichsmessungen, 17.06.2010
-
Motorsteller: Dragonsky mit eigener Firmware
-
dieses Mal wurde der Standschub nicht gemessen, sondern aus der Drehzahl und den bei den vorigen Messungen ermittelten Zusammenhängen berechnet
-
der Turnigy ist dieses Mal das Exemplar 2 in Sternschaltung
-
beim Turnigy wurden verschiedene Timings getestet
Ergebnis: der Gesamtwirkungsgrad hängt eben nicht nur von einem der Teilnehmer ab. Mit einem 3s-LiPo ist der umgewickelte Turnigy immer besser als der fusion, wenn man von den mechanischen Qualitäten und dem maximalen Schub absieht.
Für alle getesteten Varianten gilt: die EPP0845 kann (bei sehr hohem Schub) ebensogut sein wie die gekürzte EPP1045; besser ist sie jedoch nie. Die APC838 bringt in jedem Fall ebensoviel Standschub pro Leistung wie die gekürzte EPP1045, meistens sogar sehr viel mehr.
Offene Fragen:
-
ist die neue EPP0145 auch rauh? Wie verhält sie sich gekürzt?
-
wie ist das Flugverhalten mit der APC838?