Für die ersten Varianten meiner Kopter gilt:
-
Vier Fusion 2815/24 (baugleich robbe roxxy) mit gekürzten 10x4,5"-Luftschrauben.
-
Motorsteller: Dragonsky 10A (baugleich mit robbe roxxy); mit einer eigenen Software programmiert. Die Steller übernehmen auch die PWM-Ansteuerung der LEDs. Das spart Kabel, Portpins und Rechenleistung auf der Hauptelektronik.
-
Empfänger: Scan7 — aber auch hier: eigene Software, das Fernsteuersystem ist bis auf Sende- und Empfangshardware eine Eigenentwicklung
-
Die Hauptelektronik ist eine Eigenentwicklung basierend auf einem Mega644 und Sensoren aus einem X-Ufo-5-Board
-
Aufzeichnung von Daten auf MicroSD-Karte
-
Lagemodell per Quaternion
-
Kommunikation mit den Motorstellern per I2C
-
Derzeit mit 12MHz Quarz, Rechenleistung steht noch ausreichend zur Verfügung
-
Bis Ende 2009 war das Regelungsmodell besonders: eine Drehgeschwindigkeitsregelung, in die noch eine (schwache) Lageregelung (Solllage: horizontal) eingreift, deren Verstärkung knüppelabhängig ist. Somit kann man theoretisch ohne "if" Loopings fliegen (wurde aber nie getestet).
-
Ende 2009 wurde umgebaut auf einen lagegeregelten Modus (langweiliges Schweben) und einen drehratengeregelten Modus, im Flug umschaltbar.
Es wurden verschiedene Rahmen und Landegestelle benutzt, im Folgenden zeige ich eine Auswahl davon.
1. Rahmen 04 (Erstflug Ende April 2010)
Änderungen im Vergleich zu Version 03:
-
Arme wieder gerade und damit leichter herzustellen.
-
minimierte Abstände (Propeller/Zentralgehäuse sowie Propeller/Propeller) um ein kleineres Transportmaß zu erreichen. Für die Flugeigenschaften könnte das negativ sein (siehe STARMAC).
-
Motorsteller unter die Motoren verlegt. Das sieht sauberer aus und verbessert die Strömung.
-
Zentralgehäuse wieder als Sandwich hergestellt, aber mit Hartschaum als Stützstoff.
-
Deckel aus PET.
-
Arme und Motoren nicht starr mit dem Zentralgehäuse verbunden, sondern über Moosgummi. Damit sollten weniger Schwingungen übertragen werden, aber die ersten Messergebnisse sehen nicht gut aus. Mit 03 gab es jedoch manchmal beim Rundflug Motorgeräusche (vermutlich durch große und hochfrequente Reglereingriffe), die jetzt nicht mehr auftreten. Der Bauaufwand ist groß, ebenso das Gewicht: diese Dämpfung kostet sicher 8g. Weitere Versuche (z.B. Dämpfung mit Silikon) werden folgen.
Ohne Kamera, mit Akku 3S 1500mAh wiegt das Ding flugfertig 391g. Ohne die Dämpfung (die ja neu gegenüber Version 3 ist) wären es nur ca. 383g…
Auf Grund der Geometrie ist die Lageerkennung erheblich schwieriger als bei Rahmen 03. 04 ist von oben/unten durch das runde Gehäuse voll-symmetrisch, ebenso ist das Gehäuse zur Ebene der Arme symmetrisch.
Durch die beim Gehäuse verwendeten Kohlerovings waren dessen Farben nicht rein, wodurch schon bei kleinen Entfernungen der Kontrast zu schwach erscheint. Als Abhilfe musste lackiert werden: die im Laden verfügbaren Farben waren aber nicht ideal, daher habe ich nur teillackiert, was aus der Nähe grauenhaft aussieht, in Flugentfernung aber ok ist…
Diese Version fühlt sich im Vorwärtsflug erheblich langsamer an als die vorige; vermutlich macht sich die stark vergrößerte Stirnfläche bemerkbar.

Nach dem ersten Flug im Freien habe ich den Kopter auf x-Konfiguration umprogrammiert und teilweise umlackiert. Mit der nächsten Version sollte somit die Sichtbarkeit trotz der kleinen Abmessungen wieder etwas besser sein — nachdem ich mich an die neue Anordnung gewöhnt habe.

2. Rahmen 03 (Erstflug: Ende Oktober 2009)
-
Gehäuse: Sandwich aus Balsaholz und GfK
-
Fluggewicht ohne Kamera, mit Akku 3S 1500mAh: 400g
Hier ein Bild mit den minimalen Landepuffern (Kabelbinder und wenig Moosgummi, insgesamt 1,5g). Durch die nach oben gebogenen Arme ist noch ausreichend Luft zwischen Motoren und Boden.

Am hinteren Ausleger ist ein Fähnchen zur besseren Orientierung angebracht (ja, hinten! Bei Fluggeräten baut man nicht absichtlich Seitenflächen vor den Schwerpunkt!).
Außerdem ist der Kopter in einem der tollen Videos von ygramul zu sehen; an diesem Tag bin ich noch mit den Landefüßen der Vorgängerversion geflogen.
Zum Fotografieren werden die minimalen Landepuffer entfernt und stattdessen ein hohes Landegestell mit integrierter Kamerahalterung angebaut (Gestell und Kamera wiegen nur 67g!).

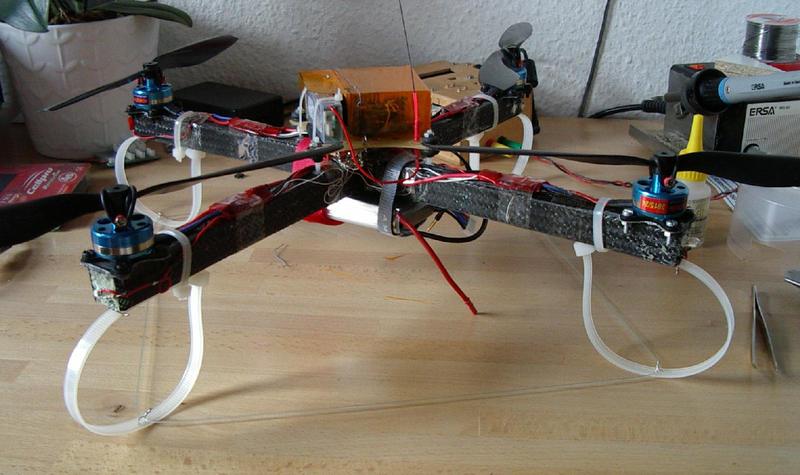
3. Ein Vorgänger (Erstflug: 30.08.2009)
Diese Version wog flugfertig 420g (ohne Kamera, mit Akku 3S 1500mAh).
Hier ein Bild mit montiertem Kameragestell, ohne Akku. Die normalerweise benutzten Landefüße sind weiterhin angebaut. Die Haube über der Elektronik ist gerade ausreichend, um vor direkter Sonneneinstrahlung und evtl. einsetzendem Regen zu schützen. Wie immer steht die Funktion und geringer Bauaufwand vor dem Aussehen im Vordergrund.

4. Übungsrahmen, zweites Landegestell
Mit diesem Rahmen habe ich die ersten zehn Flugstunden mit Akku im Freien absolviert. Kurz nach der Aufnahme wurden farbliche Markierungen angebracht.
5. Übungsrahmen, erstes Landegestell
Damit wurden Regelungstechnik und Pilot (der vorher nur Erfahrung mit Flächenflugzeugen hatte) bei Flügen in der Wohnung erprobt. Zur Stromversorgung diente meistens ein PC-Netzteil.
